M.A. Danino MD PhD FRCSc.; J. Bou-Merhi MD FRCSc .; P.G. Harris MD FRCSc
Service de chirurgie plastique CHUM
La chirurgie plastique n’est pas une spécialité d’organe, mais une spécialité comprenant un corpus de principes et de techniques appliquées à travers différentes régions anatomiques. La chirurgie robotique fut d’abord pensée par l’agence spatiale des États Unis comme un moyen de prodiguer des soins aux astronautes [1]. Si cette vision ne fut jamais appliquée, l’assistance robotique s’est développée d’abord dans l’industrie, puis depuis près de 15 ans, en chirurgie.
Pour certaines spécialités, des procédures robotiques sont aujourd’hui des standards de soins, c’est le cas en urologie, chirurgie endocrinienne, cardio thoracique et gynécologique.
Le système robotique le plus utilisé actuellement dans le monde est le Da Vinci Surgical System (Intuitive Surgical, California, USA) il utilise une technologie haute définition en 3 dimensions avec un grossissement important et 7 degrés de liberté.
Après une revue de l’état actuel de développement de la chirurgie robotique dans les différents secteurs de la chirurgie plastique, nous dresserons un inventaire des possibilités les plus séduisantes et les plus réalistes.
Méthodologie
Une recherche Pubmed a été réalisée en utilisant les termes suivants: chirurgie plastique robot / robotique, chirurgie reconstructive robotique, micro chirurgie robotique et chirurgie robotisée. Les résumés ont été évalués pour inclusion et articles référencés. Tous les types de méthodes d’étude et de recherche qui comprenaient des sujets (animaux, humains ou cadavériques) ont été inclus pour cette analyse exhaustive. Pour chaque article, nous avons extrait les données clés sur le nombre de cas, les sujets utilisés, le type de procédure. Chaque document a été classé selon son niveau d’évidence [4].
Résultats
38 publications relatives aux procédures robotisées en chirurgie plastique ont été retrouvées [3]. Ces publications se répartissaient en trois groupes pour un total de 377 procédures dont 278 microvasculaires, 78 lambeaux et 21 micro neurales.
- la Microchirurgie vasculaire a été rapidement un champ d’expérimentation pour la chirurgie robotique. La première publication de microanastomose vasculaire robotique chez le rat date de 2001 avec comme résultat un temps d’exécution plus lent, mais des taux de succès équivalent [5]. La même année Krapsohl et al. ont analysé les apports qualitatifs de la robotique et ont défendu un abolition du tremblement et une meilleure précision du geste [6]. Une étude objective plus récente a comparé 30 microanastomoses standards et 31 assistées par robot avec d’excellents taux de perméabilité pour les deux méthodes, mais un temps beaucoup plus long pour les cas robotiques [7]. Morita a rapporté la seule évaluation quantitative des tâches robotiques versus manuelles dans un cadre microchirurgical [8], avec une précision dans un champ microchirurgical significativement meilleure avec le robot pour les tâches microvasculaires profondes. Plusieurs cas de lambeau libre avec anastomoses microvasculaires pour la reconstruction oropharyngée ont été couronnés de succès à ce jour [9, 10]. Plutôt que de se concentrer sur le temps ischémique chaud comme seul critère de succès et d’amélioration, les auteurs ont évalué la baisse de morbidité liée à l’accès. L’utilisation du robot pour effectuer l’anastomose dans un espace anatomique confiné peut réduire les incisions d’abord, voir éviter des sections mandibulaires d’accès [10].
- La microchirurgie nerveuse périphérique robotique a été tentée parallèlement à la chirurgie microvasculaire robotique. Mantovani et al. a exploré le plexus brachial supraclaviculaire avec interposition réussie de greffon nerveux en utilisant le robot dans une étude cadavérique [11]. L’avantage principal était une dissection neurale plus précise avec le robot. Une étude antérieure avait déjà révélé une dissection plus rapide des tissus mous à l’aide du robot [12]. L’exploration robotique des nerfs par des voies d’abord limitées est une perspective intéressante, en particulier pour l’exploration des plexus brachiaux. La chirurgie étant souvent la modalité diagnostique et thérapeutique la plus précise chez ces patients, des cicatrices réduites et un diagnostic précoce sont attrayants.
- la chirurgie robotique de lambeaux: Si la résection tumorale transorale robotique en carcinologie de la tête et du cou semble avoir montré son intérêt. La reconstruction robotique transorale pourra préserver les avantages d’une résection tumorale peu invasive. Smartt et al. ont décrit la levée robotique de lambeaux de la paroi pharyngée postérieure sur trois cas cadavériques [13]. Bonowitz et al. a utilisé le robot pour reconstruire des pertes de substances palatines en utilisant un lambeau de musculo muqueux de buccinateur (FAMM) dans cinq cas [14]. L’avantage décrit était une meilleure visualisation lors de la dissection et de la mise en place du lambeau, cependant trois cas ont eu une déhiscence mineure ayant nécessité une révision chirurgicale. La mise en place robotique de lambeaux libres peut préserver la mandibule dans certain cas de tumeur de l’oropharynx et permettre la suture du lambeau dans son site receveur qui serait normalement impossible sans sectionner la mandibule [15,16 17]. Selber a travaillé sur un des lambeaux les plus utilisés en chirurgie plastique, le Latissimus Dorsi (LD). Il a d’abord démontré que sa levée robotique était réalisable chez le cadavre avec des durées acceptables par des incisions limitées aux ports; puis dans sept cas cliniques, il a confirmé la possibilité de lever un lambeau de grand dorsal avec une cicatrice réduite ou inexistante.
- L’abord de vaisseaux receveur est souvent un défi en chirurgie de reconstruction. Le robot pourrait en améliorer l’accès. La seule série rapportée dans la littérature concerne l’abord robotique des vaisseaux mammaires internes pour la reconstruction du sein par lambeau libre abdominal DIEP. Cette technique est certainement esthétiquement attrayante. Cependant, il y avait dans cette série un taux élevé de complications : hématome, pertes de lambeau, de pneumothorax et de sepsis thoracique [19].
Conclusion
La chirurgie endoscopique a été la révolution chirurgicale de l’après-guerre, celle-ci ne donne pas une appréhension du relief, avec au site chirurgical une limitation du champ à deux dimensions par un scope et un trocart fixes et une lente courbe d’apprentissage. Ceci explique le développement très limité de la chirurgie plastique endoscopique (20).
Ceci a abouti au paradoxe de la chirurgie plastique, chirurgie de l’esthétique, mais conservant les voies d’abord chirurgicales avec les plus longues cicatrices [2].
L’appréhension d’un champ chirurgical en trois dimensions, le grossissement, une courbe d’apprentissage plus rapide, une correction du tremblement physiologique humain et une utilisation partagée par plusieurs spécialités constituent des éléments de la robotique a priori intéressant pour notre spécialité. Mais l’absence de passage par la révolution endoscopique et un certain conservatisme font que la chirurgie plastique semble prendre le train de la robotique de façon plus lente que d’autres spécialités.
La chirurgie robotique peut être appliquée à tous les aspects de la chirurgie plastique : L’aide à la dissection des tissus mous; la chirurgie nerveuse robotique; la levée de lambeaux, la microsuture et la mise en place des lambeaux en zones inaccessibles pourraient être réalisées avec une diminution significative de la morbidité chez les patients.
Références
- Camarillo DB, Krummel TM, Salisbury Jr JK. Robotic technology in surgery: past, present, and future. Am J Surg 2004;188(4A Supp)2s—15s.
- Usui S, Inoue H, Yoshida T, Kudo SE, Iwai T. Preliminary report of multi Degrees of Freedom Forceps for Endoscopic Surgery. Surg Laparosc Endosc Percutan Tech 2004;24:66—72.
- Saleh DB, et al. Plastic and reconstructive robotic microsurgery — a review of current practices. Ann Chir Plast Esthet (2015), http://dx.doi.org/10.1016/j.anplas.2015.03.005
- Li RA, Jensen J, Bowersox JC. Microvascular anastomoses performed in rats using a microsurgical telemanipulator. Com- put Aided Surg 2000;5:326—32.
- Le Roux PD, Das H, Esquenazi SB, Kelly J, Patrick MD. Robotic assisted microsurgery: a feasibility study in the rat. Neurosurgery 2001;48:584—9.
- Krapohl BD, Reichert B, Machens HG, Mailander P, Siemionow M, Zins JE. Computer guided microsurgery: surgical evaluation of a telerobotic arm. Microsurgery 2001;21:22—9.
- Knight CG, Lorincz A, Cao A, Gidell K, Klein MD, Langenburg SE. Computer-assisted, robot-enhanced open microsurgery in an animal model. J Laparoendosc Adv Surg Tech A 2005;15:182—5.
- Morita A, Sora S, Mitsuishi M, et al. Microsurgical robotic system for the deep surgical field: development of a prototype and feasibility studies in animal and cadaveric models. J Neurosurg 2005;103:320—7.
- Selber JC. Transoral robotic reconstruction of oropharyngeal defects: a case series. Plast Reconstr Surg 2010;126:1978—87.
- Song HG, Yun IS, Lee WJ, Lew DH, Rah DK. Robot-assisted free flap in head and neck reconstruction. Arch Plast Surg 2013;40:353—8.
- MantovaniG,LiverneauxP,GarciaJrJC,BernerSH,BednarMS, Mohr CJ. Endoscopic exploration and repair of brachial plexus with telerobotic manipulation: a cadaver trial. J Neurosurg 2011;115:659—64.
- Schiff J, Li PS, Goldstein M. Robotic microsurgical vasovasost- omy and vasoepididymostomy: a prospective randomized study in a rat model. J Urol 2004;171:1720—5.
- ] Smartt JH, Gerety P, Serletti JM, Taylor JA. Application of a robotic telemanipulator to perform posterior pharyngeal flap surgery: a feasibility study. Plast Reconstr Surg 2013;131:841—5.
- Bonawitz SC, Duwuri U. Robotic-assisted FAMM flap for soft palate reconstruction. Laryngoscope 2013;123:870—4.
- Selber JC. Transoral robotic reconstruction of oropharyngeal defects: a case series. Plast Reconstr Surg 2010;126:1978—87.
- Bonawitz SC, Duvvuri U. Robot-assisted oropharyngeal recon- struction with free tissue transfer. J Reconstr Microsurg 2012;28:485—90.
- Ghanem TA. Transoral robotic-assisted microvascular recon- struction of the oropharynx. Laryngoscope 2011;12:580—2.
- Selber JC. Robotic Latissimus Dorsi muscle harvest. Plast Reconstr Surg 2011;128:88—9.
- BoydB,UmanskyJ,SamsonM,BoydD,StahlK.Roboticharvest of internal mammary vessels in breast reconstruction. J Reconstr Microsurg 2006;22:261—6.
- LeddyLS,LendvayTS,SatavaRM.Roboticsurgery;applications and cost effectiveness. Open Access Surg 2010;3:99—107.
Figures
1. Reconstruction post dermatofibrosarcoma paroi abdominale
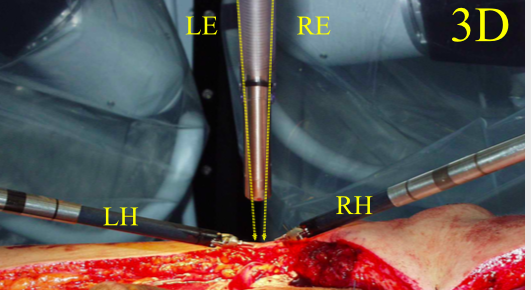
2. Micro suture vasculaire robotique
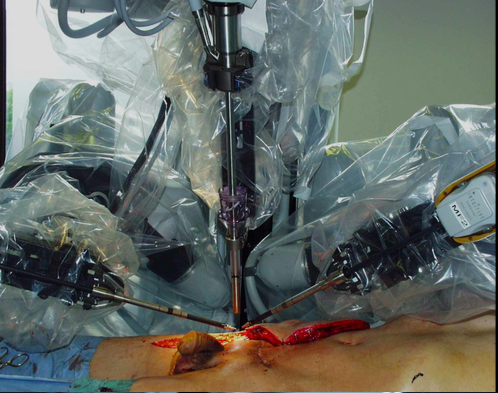
3. Champ opératoire